Classifica Utenti
Utenti più Apprezzati
(Scegli il periodo) Utenti più Apprezzati
(Storia giorno per giorno) Classifica dall'Origine
(da Marzo 2003)
(Scegli il periodo) Utenti più Apprezzati
(Storia giorno per giorno) Classifica dall'Origine
(da Marzo 2003)
The search index is currently processing. Leaderboard results may not be complete.




Contenuti più Popolari
Stai visualizzando i contenuti con il più alto punteggio, pubblicati in data 03/09/21 e localizzati Tutte le aree/sezioni
-
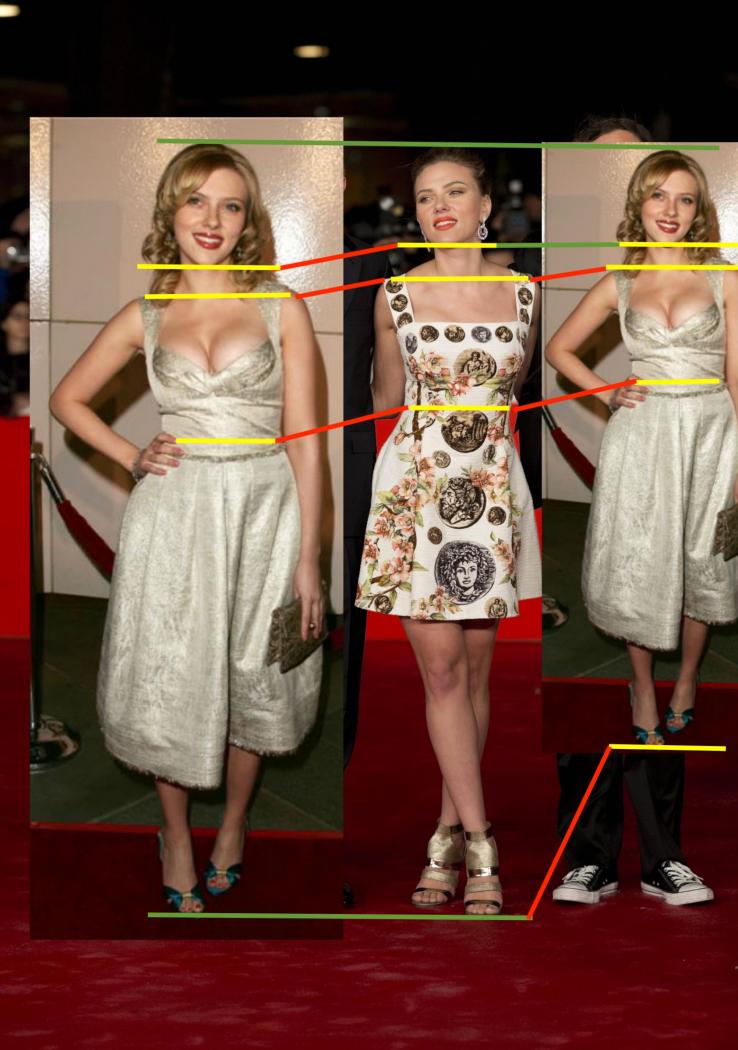
Perdonate l'OT ma non me la sento di aprire un topic su questo argomento. Parlo delle sensazioni suscitate da foto di auto riprese da lontano, auto che ancora non si conoscono, per cui la testolina di chi guarda le foto non ha abbastanza "dati" per farsi un'idea corretta, e si lascia ingannare dalla prospettiva insolita. Vi faccio un esempio diverso dall'auto che rende meglio l'idea. - BENVENUTI SU CASTELpareri - Conoscete il Castel Del Monte? E' quello sulle monetine da 1 centesimo. Se fosse un'auto, questa sarebbe una foto come quelle degli annunci su autoscout24, molto ravvicinata: L'effetto è molto "angolato", la prospettiva distorce le linee, ma si capisce ben com'è fatto. Questa invece la foto da distanza media: se ne apprezzano meglio le proporzioni ma dà ancora una buona idea della tridimensionalità del soggetto: Infine, la foto ripresa da molto lontano con un super-zoom: la prospettiva diventa quasi ortogonale, da disegno tecnico: quelle sono le reali proporzioni del soggetto, ma le linee sembrano distese in maniera quasi "innaturale" perchè a occhio nudo non lo vedremo mai così quel soggetto: lo vedremmo molto piccolo e perderemmo i dettagli, da quella distanza: Vedete come sembra più "disteso" (cioè "allungato" da sinistra a destra?) Ecco cosa succede alle foto di auto paparazzate da lunga distanza. Poi, come già detto prima, è impossibile fare auto ICE tutt'avanti senza sbalzo. Ma da qui a dire che ogni auto ha sbalzi enormi ce ne passa. Scusate l'OT.


 14 punti
14 punti -
13 puntiSai che novità. Noi tifosi è una vita che stringiamo il posteriore.13 punti
-
Mi ricorda da me quando attivarono il servizio di firma elettronica per i servizi. Un collega raccontò la trafila con un suo cliente. "Guardi, adesso abbiamo la firma digitale basta avere i codici..." "quelli dell'internet banking?" "no, sono codici diversi. Lei li richiede, poi quando le arrivano fa la telefonata, prende i codici dell'internet banking, si autentica, poi prende i codici della firma digitale e firma. Io nel frattempo entro con i miei codici e dopo che lei ha autorizzato io autorizzo con i miei" "....senta dottore.....ma se metto una firma su questo modulo è la stessa cosa?" "...si..." "e allora mi faccia firmare così" Si vede che adesso chi la creò lavora in BMW12 punti
-
9 punti
-
Comunque io sono un contafagioli come tavares, solo in piccolissimo e mille volte meno importante e posso dire che dopo un po’ che si taglia e razionalizza ci si deve porre tante domande su quanto si possa tirare la corda. Posso dire che nel breve periodo si possono ottenere risultati straordinari, ma la valutazione dell’operato di un manager deve essere fatta sull’eredita’che lascia. Non sempre le scelte in economia pagano nel lungo periodo. Attualmente l’automotive e’ in una fase dove si deve tagliare su molte cose e innovare su altre, più che nel passato. Sono sicuro che Tavares abbia chiaro dove fare l’una o l’altra cosa. Non sono invece così sicuro che abbia una visione lungimirante su tanti brand della costellazione stellantis.. sopratutto non sono sicuro della sua medicina applicabile a tutto. L’antibiotico uccide i batteri ma non i virus, spero abbia ben chiaro che cio’ che funziona una volta non e’ detto che rifunzioni per tante situazioni diverse ( marchi, mercati, popoli, lavoratori, stati etc)6 punti
-
Intendevo quelle che "spingono", non quelle che "tirano".....6 punti
-
Premesso che la cosa suscita in me un interesse prossimo allo zero, mi pare che Android Auto sia arrivato su "certe tedesche" solo di recente........6 punti
-
Qui ragazzi c'è da coniare un nuovo motto L'effettobolla-zoommato6 punti
-
E' sempre così, prima i Suv erano uno status symbol di una certa categoria, ora che è diventata per "tutti", si cercano altre soluzione per distinguersi. Ecco la "rinascita" delle versioni "estate".5 punti
-
OT mi viene da ridere a pensare che per i comuni mortali stiano scomparendo Station Wagon e affini mentre nel contempo per i super abbienti si vada in questa direzione5 punti
-
TL;DR; Riassunto: roba da nerd su centraline, CAN-bus, Arduino e applicazioni per la telemetria. Se siete ancora qui, continuate pure a leggere Ciao a tutti, condivido con voi un piccolo progetto "fai da te" che sto portando avanti. Da qualche anno quando vado in pista uso RaceChrono, un'applicazione "lap timer", che prende i tempi sul giro usando riferimenti GPS. Questa applicazione può anche ricevere dati dalle varie centraline dell'auto, ed è poi possibile usare questi dati in sovraimpressione su un video per fare analisi e migliorare i propri tempi ecc ecc. La maggior parte delle app simili usa i dati ottenuti tramite il protocollo diagnostico OBD-2 o OBD-II. Questo protocollo funziona a domanda e risposta: l'applicazione, tramite un apposito adattatore, chiede di ottenere un dato e la centralina, quando ha tempo, risponde. Ovviamente questo protocollo non è pensato per fornire in modo affidabile dati ad alta velocità. Fortunatamente dalla versione 6 di RaceChrono è possibile leggere direttamente i dati che viaggiano sul CAN-bus, ovvero il network che collega tutte le centraline sull'auto. Su questo network passano moltissime informazioni, tutte quelle che le varie centraline della vettura si scambiano per garantire il corretto funzionamento dell'auto. Ad esempio i segnali relativi alla pressione del pedale del freno, per l'ABS, dell'angolo di sterzo, della posizione dell'acceleratore, le accelerazioni dalla piattaforma inerziale per l'ESP ecc ecc. A differenza di OBD-2 non c'è bisogno di interrogare e aspettare una risposta, i dati viaggiano sempre a cadenze assegnate, fino anche a 100 aggiornamenti al secondo. Purtroppo, a differenza del protocollo OBD-2 che è molto ben documentato, come interpretare quello che viaggia su CAN-bus è noto praticamente solo al costruttore e a chi compra le tabelle con i "Data Length Code". Non solo, una volta capito cosa contiene il messaggio, bisogna anche trovare una funzione di trasferimento, un'equazione, che trasformi il dato digitale in una misura leggibile. Per questo motivo si rende necessario un "reverse engineering" per capire a cosa corrispondono i messaggi acquisiti. In questa guida, in inglese, spiego come ho fatto ad ottenere una serie di associazioni tra messaggi sul CAN-bus e dati misurati, utilizzando un Raspberry Pi e una scheda di acquisizione CAN. Questa procedura vale per qualunque auto dotata di CAN-bus e presa OBD, ed è totalmente sicura perché si limita a leggere dati, non manda nessun segnale. Se avete tempo e voglia provate anche voi, potrebbe essere interessante avere un database di "ID" per diverse vetture. Su OpenGarage c'è già qualcosa di simile: http://opengarages.org/index.php/Raw_link_references_for_CAN_IDs ma è molto limitato e, ad esempio, gli ID trovati per Mazda vanno bene per la 3 ma non per MX-5. Ad esempio @superkappa125 potresti provare sullo sfilatino, che centralina monta? Magari è simile a MX-5, o magari è simile a qualcosa per Ford. @8coibaf potresti tirar fuori gli ID per la 124, che poi immagino saranno molto simili ad alre auto Abarth. Le associazioni ottenute le ho raccolte in questo file: https://github.com/jeby/RaceChronoDiyBleDevice/blob/master/can_db/mazda_mx5_nc.md In cui ho anche specificato l'equazione da inserire in RaceChrono per ottenere un dato leggibile. Tutto questo lavoro per cosa? Per costruire un dispositivo, basato su Arduino, che una volta connesso alla porta OBD dell'auto mandi i segnali CAN-bus tramite BLE allo smartphone, grazie alle API messe a disposizione dallo sviluppatore di RaceChrono. Le istruzioni per costruire il dispositivo e il codice per farlo funzionare sono un fork personalizzato di un progetto analogo fatto per funzionare su BRZ/GT86, modificato per funzionare su Mazda MX5 di terza generazione. Anche qui: è tutto molto sicuro, il codice si limita a leggere e inviare la lettura. L'unico problema è che per ora non è implementato il pairing, quindi chiunque a portata potrebbe leggere i segnali sul CAN-bus (leggere, ma non scrivere!) Alternativamente RaceChrono può leggere il CAN-bus anche da dispositivi a marchio OBDLink compatibili, come OBDLink LX, MX e MX+, ma attualmente c'è un bug che impedisce di leggere gli ID sotto al 100. Il bug è già stato risolto nella 7.2 beta per Android, la cui release finale è attesa per quest'anno. Il dispositivo Arduino comunica via BLE ed è quindi limitato nel numero di ID che invia, per ora a 6 ID, ma raggiunge frequenze di aggiornamento molto elevate, fino a 50 messaggi / secondo per alcuni canali, considerate che sul CAN-bus le frequenze massime sono intorno ai 100 messaggi / secondo su alcuni ID. A livello di costi, se avete pazienza, se la dogana non fa storie, e se avete già saldatore a stagno e cavetteria varia, il dispositivo Arduino verrà a costare circa la metà del meno costoso tra gli OBDLink, quindi circa 25€ Ho già testato in strada e funziona tutto in maniera impeccabile, sto ancora cercando di tirare fuori informazioni dall'ID 090 che credo contenga informazioni provenienti dalla piattaforma inerziale, ma non riesco a trovare una funzione di trasferimento che rappresenti il dato. Attendo di poter andare di nuovo in pista per acquisire dati più vicini ai massimi delle accelerazioni leggibili (in strada 1 g me lo scordo)4 punti
-
Quindi se ti perdi (o se ti si scarica) il telefono sei a piedi, senza soldi e senza possibilità di comunicare. Bisognerà portarsi un secondo telefono per le emergenze.4 punti
-
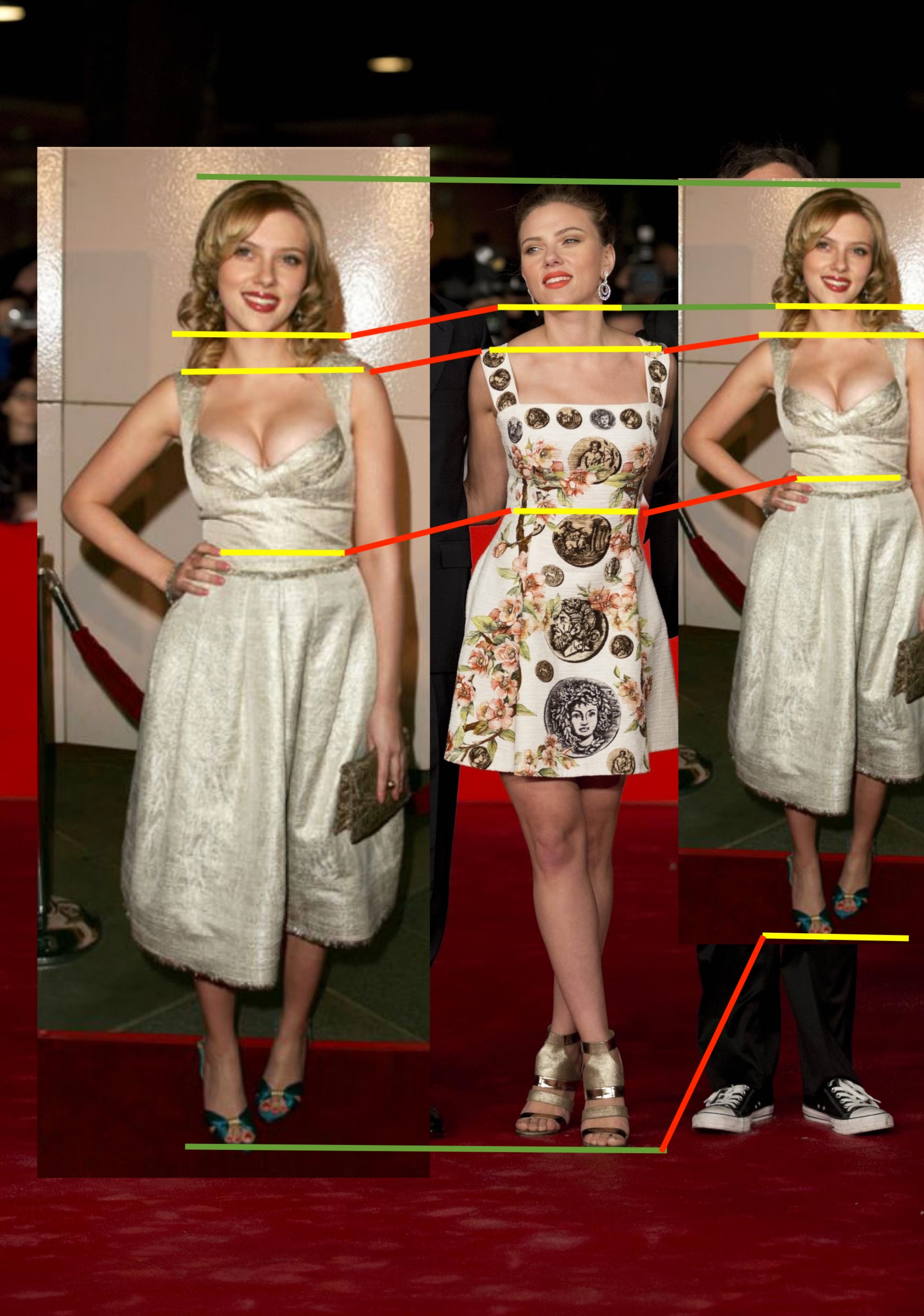
4 puntici spero anche io ogni tanto, ma lo so già che non sarà cosi... mascherano il cazzillo con il nero (che sarebbe già tanta roba)4 punti4 puntiIo sono un cliente e sono tutt'altro che deluso. E i FULLEDDE!!!4 punti@Davialfa Absolutely! Not to mention that mister Tavaresh had failed with PSA at 2 out of 3 markets. Markets where PSA was strong in terms of sales. He basically killed PSA in China and almost did it in South America. Every market, every brand, needs different approach. Something which may work for Peugeot and in France may not work for Fiat and Italy and for sure will not work for Alfa Romeo.3 punti3 punti3 puntiin effetti però la Scarletta ha uno sbalzo anteriore notevole. indipendentemente dallo zoom.3 puntiahahah! tu scherzi ma all'inizio volevo fare un paragone con le foto di una bella donna, poi ho ripiegato sul castello per essere politicamente corretto (e perché i ritratti subiscono anche gli effetti della scelta dell'obiettivo fotografico). Però ci provo lo stesso: al centro, una foto di Scarlett ripresa dalla giusta distanza e con il giusto obiettivo: è bella e ben proporzionata. L'altra foto è ripresa da una distanza molto inferiore, e se (a sinistra) adeguo le dimensioni della figura intera a quella centrale, si noterà che la foto ravvicinata è tutta sproporzionata: testa e spalle enormi, e gambe corte. Se invece (a destra) allineo le dimensioni della testa (presumendo che l'attrice non abbia cambiato circonferenza cranica tra uno scatto e l'altro), allora la foto ravvicinata risulterà deformata, sempre con parte superiore più grande della parte inferiore Se le gambe fossero lo sbalzo anteriore di un'auto, nelle foto ravvicinate direste "sbalzo nella norma", nella foto distanziata direste "sbalzo abnorme, troppo lungo". Scarlett invece ha solo gambe più lunghe. ____ Ah! e comunque la macchina è stata fotografata da distanza più umana, anche se camuffata; vediamo cosa ne dite delle proporzioni dopo tutte queste pippe


 3 punti3 puntiIl problema che vedo è lo SPOF (single point of failure). Se metti tutto sul telefono e resti senza telefono sei fottuto. Mi è successo anni fa quando avevo il bancomat che era anche carta di credito e mi si è smagnetizzato. Mi sono dovuto far dare i soldi in contanti da mio padre per andare avanti fino all'arrivo del sostituto.3 punti3 puntiSposta la scomodità della chiave ad un dispositivo che comunque hai sempre con te. Può portare ad errori, certo, ma come qualsiasi dispositivo. Sul fatto che sia più facile da crackare ho grossissimi dubbi, soprattutto per quanto riguarda i sistemi basati su iOS. Per quanto riguarda l'identificazione personale, certo ognuno ha la sua idea. Sta di fatto che iOS non condivide le informazioni biometriche con nessuno ma le immagazzina fisicamente nel chip del dispositivo, tanto che quando cambi telefono devi nuovamente reinizializzarle (a differenza delle pwd che, sempre protette da info biometriche o da una master password, sono trasferibili da un dispositivo all'altro). Ci trovo lo stesso livello di innovazione di Apple Pay, ovvero una cosa assolutamente inutile se non ce l'hai e assolutamente comodissima una volta che ce l'hai.3 puntiChe ha la portofino che non va? ne ho rivista una proprio ieri e su strada è bellissima3 puntiCorrige, vedo che le ultimissime BMW lo hanno. I clienti che sanno quello che stanno usando NON usano iOS.3 punti3 punti3 puntiIn un mondo parallelo, FCA ha proseguito i contatti e si è fusa col Gruppo Renault-Nissan-Mitsubishi. L'ormai vetusta Giulietta con telaio bravo e ponte posteriore del doblò [cit.] Ha bisogno di una sostituta, Tipo vendicchia bene ma Nissan ha ancora pieni i piazzali di Pulsar, tra l'altro dotata di una tecnologia aliena, ossia il sistema di avviso di cambio corsia e angolo cieco. Ecco quindi la pazza idea. Arna 2021 (abbastanza) Veloce Q4 a 19.999 Euri e sei di nuovo Alfista. Scusate, stanotte non ho digerito e ho avuto gli incubi.3 puntiQuesta mattina è impazzita, prima ancora di salire in auto. "Prendo la tua auto di CACCA, (non ha detto esattamente così 😂) per andare al lavoro. Ordine: vai a fare benzina alla mia!!! Sono uno zerbino vivente...3 puntiLa gamma motori termica del gruppo sarà gestita da FCA, le batterie per la gamma elettrica se ne occuperà PSA con le gigafactory francesi e tedesche che partiranno nei prossimi anni.3 puntiMa ancora non ti sei reso conto che il forum è pieno di troll?3 punti3 puntiPurtroppo non puoi cambiare muso senza cambiare la scocca, perché cambiano la struttura di assorbimento e tutta la filosofia aerodinamica. La Ferrari ha deciso di spendere i due gettoni sul retrotreno. La McLaren è stata furba, perché ha introdotto il muso stretto prima del congelamento di settembre 2020. Perché non lo abbia fatto anche la Ferrari, sfruttando quel cassonetto della 1000 almeno come laboratorio, per me rimane un mistero.3 puntiMi riservo di verderla in altre foto ma per ora quel muso non mi piace per nulla. Speravo in una cosa più alla 508.3 puntiTutte le e90 318/320d hanno il motore n47 con il problema della catena, quindi lascia perdere, inoltre quei chilometraggi sono un pò sospetti considerando l'età. il 320i mi pare abbia solo problemi alle bobine, ma è un polmone a 4 cilindri... se devi andare di e90, assolutamente a 6 cilindi diesel o benzina, sia in termini di affidabilità che di piacevolezza del motore, e comunque attenzione ai kilometri2 puntiPer come la vedo io, almeno per il momento sono tutti backup. Non mi sognerei mai di sostituire in toto portafogli o chiavi con il telefono. Come dice @Matteo B., il futuro va in quella direzione. E' la stessa cosa che successe nel passaggio fra chiave classica e chiave elettronica. Apple non è il mondo e non è la maggioranza ma dal punto di vista sicurezza e privacy è leader (peraltro con obiettivi di ulteriore forte miglioramento), quindi il resto del mondo non ho dubbi che seguirà.2 puntiproprio a questo monitor pensavo io , alle superiori avevamo degli apple con gli schermi ambrati comunque questo è un IBM doppio floppy se ha un VIC20 è probabile che carichi i file con le cassette , le comprerà tarocche , si smagnetizzano ed i dati da ANAlLizzare vanno a peripatetiche2 puntiSe notate su molte cose elettroniche BMW è sempre la prima, ha una politica ben precisa e paga per esserlo. Per esempio il primo modello con CarPlay wireless era il suo o i Fari laser, ma ne dimentico molti altri Diciamo che se non si comincia non si implementa mai nulla. Quindi chi se ne frega (per ora ) della Digital Key ,ma sarà il futuro al 90% Tra l'altro (credo) che il sistema di BMW sia già oggi molto più sicuro per quanto riguarda i furti d'auto dove ti captano la frequenza della chiave elettronica.2 punticon la Digital key però la chiave non la porti più del tutto (ammettendo che , come accade spesso ,si viva in simbiosi con lo smartphone ), le carte di credito nel telefono, e (dicono ) prossimamente i documenti. E' sicuramente da implementare, ma è il futuro. tra l'altro per le auto a nolo/sharing si pensa che la chiave sara' "inviabile". E comunque mi sembra siano in corso sviluppi per permettere questa funzione dal solo Apple Watch. (non ricordo dove l'ho letto) non è una cazzata, anche se è ancora da migliorare come implementazione.2 punti2 puntiMa non credo che sia un fatto di peso. Le due berlinone vanno per le due tonnellate e peso più, peso meno non cambia nulla nel feeling di guida.2 punti2 puntiFrancamente non l'ho mai percepita come un'auto che avesse lasciato un segno in qualcosa in particolare. Auto onesta e nulla più, fatta per piacere un po' a tutti o per cercare di non scontentare quasi nessuno. Design anonimo, nessun tipo di audacia estetica, la break peggio che andar di notte. Giusto un tantino più osè la tre porte, ma niente di che. Le Citroen che hanno fatto entrare il marchio nel mito direi che siano state altre. Che addirittura la ZX abbia fatto la storia degli anni ''90, un'auto che era la contraddizione di tutto ciò che era stato Citroen e quel che aveva rappresentato nel panorama automobilistico fino a quel momento... Ma per favore...2 punti2 puntiQualche piccolo aggiornamento da una intervista a LS (quando posso metto il link) - produzione di road cars prevista per il 2021 6000 auto - ordini per le sport cars (Vantage, DB11 e DBS SL) esauriti fino a settembre 2021 - entro il 2025 prevedono due modelli BEV, una sport far ed un SUV Edit: link dal FT https://www.google.co.uk/amp/s/amp.ft.com/content/6127125e-fbe5-4900-bd8d-54cc01d8922b2 puntiBMW non ha mai avuto né ad oggi ha Android Auto su nessun modello, ma non vedo gli eserciti che si stracciano le vesti.2 punti2 puntiÈ più tormentata del mio stomaco dopo aver mangiato una peperonata alle 232 punti2 puntiLa questione è che nei SUV i segmenti sono un po' estesi, "versatili". Questo alla fine è un C-UV di fascia media; non conta il suo pianale, anche per via delle piattaforme modulari.2 punti2 puntiChe poi, è vero che nelle versioni normali era di una tristezza eguagliata solo dalle auto oltrecortina... Ma in quelle pepate era un missile, la 306 non la eguagliò come velocità.2 puntiAncora chiamiamo "tecnologia" un tablet prodotto da terzi infilato nel cruscotto o due fari LED prodotti da Magneti Marelli che fino a poco fa era di FCA? Quello lo puoi sempre fare dopo, e infatti l'hanno fatto dal MY2020 e proseguiranno con il MCA. I concorrenti possono fare lo stesso con la tecnologia che viene veramente prodotta dal fabbricante di auto, quella del corpo vettura?2 punti2 puntiPerdonatemi, ma l'ho mai trovata interessante, anzi forse il punto più in basso di Citroën.2 puntiLa Leaderboard è riferita all'orario Roma/GMT+02:00
3 punti3 puntiIl problema che vedo è lo SPOF (single point of failure). Se metti tutto sul telefono e resti senza telefono sei fottuto. Mi è successo anni fa quando avevo il bancomat che era anche carta di credito e mi si è smagnetizzato. Mi sono dovuto far dare i soldi in contanti da mio padre per andare avanti fino all'arrivo del sostituto.3 punti3 puntiSposta la scomodità della chiave ad un dispositivo che comunque hai sempre con te. Può portare ad errori, certo, ma come qualsiasi dispositivo. Sul fatto che sia più facile da crackare ho grossissimi dubbi, soprattutto per quanto riguarda i sistemi basati su iOS. Per quanto riguarda l'identificazione personale, certo ognuno ha la sua idea. Sta di fatto che iOS non condivide le informazioni biometriche con nessuno ma le immagazzina fisicamente nel chip del dispositivo, tanto che quando cambi telefono devi nuovamente reinizializzarle (a differenza delle pwd che, sempre protette da info biometriche o da una master password, sono trasferibili da un dispositivo all'altro). Ci trovo lo stesso livello di innovazione di Apple Pay, ovvero una cosa assolutamente inutile se non ce l'hai e assolutamente comodissima una volta che ce l'hai.3 puntiChe ha la portofino che non va? ne ho rivista una proprio ieri e su strada è bellissima3 puntiCorrige, vedo che le ultimissime BMW lo hanno. I clienti che sanno quello che stanno usando NON usano iOS.3 punti3 punti3 puntiIn un mondo parallelo, FCA ha proseguito i contatti e si è fusa col Gruppo Renault-Nissan-Mitsubishi. L'ormai vetusta Giulietta con telaio bravo e ponte posteriore del doblò [cit.] Ha bisogno di una sostituta, Tipo vendicchia bene ma Nissan ha ancora pieni i piazzali di Pulsar, tra l'altro dotata di una tecnologia aliena, ossia il sistema di avviso di cambio corsia e angolo cieco. Ecco quindi la pazza idea. Arna 2021 (abbastanza) Veloce Q4 a 19.999 Euri e sei di nuovo Alfista. Scusate, stanotte non ho digerito e ho avuto gli incubi.3 puntiQuesta mattina è impazzita, prima ancora di salire in auto. "Prendo la tua auto di CACCA, (non ha detto esattamente così 😂) per andare al lavoro. Ordine: vai a fare benzina alla mia!!! Sono uno zerbino vivente...3 puntiLa gamma motori termica del gruppo sarà gestita da FCA, le batterie per la gamma elettrica se ne occuperà PSA con le gigafactory francesi e tedesche che partiranno nei prossimi anni.3 puntiMa ancora non ti sei reso conto che il forum è pieno di troll?3 punti3 puntiPurtroppo non puoi cambiare muso senza cambiare la scocca, perché cambiano la struttura di assorbimento e tutta la filosofia aerodinamica. La Ferrari ha deciso di spendere i due gettoni sul retrotreno. La McLaren è stata furba, perché ha introdotto il muso stretto prima del congelamento di settembre 2020. Perché non lo abbia fatto anche la Ferrari, sfruttando quel cassonetto della 1000 almeno come laboratorio, per me rimane un mistero.3 puntiMi riservo di verderla in altre foto ma per ora quel muso non mi piace per nulla. Speravo in una cosa più alla 508.3 puntiTutte le e90 318/320d hanno il motore n47 con il problema della catena, quindi lascia perdere, inoltre quei chilometraggi sono un pò sospetti considerando l'età. il 320i mi pare abbia solo problemi alle bobine, ma è un polmone a 4 cilindri... se devi andare di e90, assolutamente a 6 cilindi diesel o benzina, sia in termini di affidabilità che di piacevolezza del motore, e comunque attenzione ai kilometri2 puntiPer come la vedo io, almeno per il momento sono tutti backup. Non mi sognerei mai di sostituire in toto portafogli o chiavi con il telefono. Come dice @Matteo B., il futuro va in quella direzione. E' la stessa cosa che successe nel passaggio fra chiave classica e chiave elettronica. Apple non è il mondo e non è la maggioranza ma dal punto di vista sicurezza e privacy è leader (peraltro con obiettivi di ulteriore forte miglioramento), quindi il resto del mondo non ho dubbi che seguirà.2 puntiproprio a questo monitor pensavo io , alle superiori avevamo degli apple con gli schermi ambrati comunque questo è un IBM doppio floppy se ha un VIC20 è probabile che carichi i file con le cassette , le comprerà tarocche , si smagnetizzano ed i dati da ANAlLizzare vanno a peripatetiche2 puntiSe notate su molte cose elettroniche BMW è sempre la prima, ha una politica ben precisa e paga per esserlo. Per esempio il primo modello con CarPlay wireless era il suo o i Fari laser, ma ne dimentico molti altri Diciamo che se non si comincia non si implementa mai nulla. Quindi chi se ne frega (per ora ) della Digital Key ,ma sarà il futuro al 90% Tra l'altro (credo) che il sistema di BMW sia già oggi molto più sicuro per quanto riguarda i furti d'auto dove ti captano la frequenza della chiave elettronica.2 punticon la Digital key però la chiave non la porti più del tutto (ammettendo che , come accade spesso ,si viva in simbiosi con lo smartphone ), le carte di credito nel telefono, e (dicono ) prossimamente i documenti. E' sicuramente da implementare, ma è il futuro. tra l'altro per le auto a nolo/sharing si pensa che la chiave sara' "inviabile". E comunque mi sembra siano in corso sviluppi per permettere questa funzione dal solo Apple Watch. (non ricordo dove l'ho letto) non è una cazzata, anche se è ancora da migliorare come implementazione.2 punti2 puntiMa non credo che sia un fatto di peso. Le due berlinone vanno per le due tonnellate e peso più, peso meno non cambia nulla nel feeling di guida.2 punti2 puntiFrancamente non l'ho mai percepita come un'auto che avesse lasciato un segno in qualcosa in particolare. Auto onesta e nulla più, fatta per piacere un po' a tutti o per cercare di non scontentare quasi nessuno. Design anonimo, nessun tipo di audacia estetica, la break peggio che andar di notte. Giusto un tantino più osè la tre porte, ma niente di che. Le Citroen che hanno fatto entrare il marchio nel mito direi che siano state altre. Che addirittura la ZX abbia fatto la storia degli anni ''90, un'auto che era la contraddizione di tutto ciò che era stato Citroen e quel che aveva rappresentato nel panorama automobilistico fino a quel momento... Ma per favore...2 punti2 puntiQualche piccolo aggiornamento da una intervista a LS (quando posso metto il link) - produzione di road cars prevista per il 2021 6000 auto - ordini per le sport cars (Vantage, DB11 e DBS SL) esauriti fino a settembre 2021 - entro il 2025 prevedono due modelli BEV, una sport far ed un SUV Edit: link dal FT https://www.google.co.uk/amp/s/amp.ft.com/content/6127125e-fbe5-4900-bd8d-54cc01d8922b2 puntiBMW non ha mai avuto né ad oggi ha Android Auto su nessun modello, ma non vedo gli eserciti che si stracciano le vesti.2 punti2 puntiÈ più tormentata del mio stomaco dopo aver mangiato una peperonata alle 232 punti2 puntiLa questione è che nei SUV i segmenti sono un po' estesi, "versatili". Questo alla fine è un C-UV di fascia media; non conta il suo pianale, anche per via delle piattaforme modulari.2 punti2 puntiChe poi, è vero che nelle versioni normali era di una tristezza eguagliata solo dalle auto oltrecortina... Ma in quelle pepate era un missile, la 306 non la eguagliò come velocità.2 puntiAncora chiamiamo "tecnologia" un tablet prodotto da terzi infilato nel cruscotto o due fari LED prodotti da Magneti Marelli che fino a poco fa era di FCA? Quello lo puoi sempre fare dopo, e infatti l'hanno fatto dal MY2020 e proseguiranno con il MCA. I concorrenti possono fare lo stesso con la tecnologia che viene veramente prodotta dal fabbricante di auto, quella del corpo vettura?2 punti2 puntiPerdonatemi, ma l'ho mai trovata interessante, anzi forse il punto più in basso di Citroën.2 puntiLa Leaderboard è riferita all'orario Roma/GMT+02:00